Roveri na Marsu ne moraju naići na liticu da bi misija zapela. Dovoljan je pijesak: kotači mogu izgubiti oslonac, početi proklizavati i postupno se ukopati u mekanu podlogu. Njemački istraživači zato testiraju neobično rješenje, kotače nadahnute guštericom Scincus scincus, vrstom koja se kroz saharski pijesak kreće valovitim pokretima tijela.
Tim sa Sveučilišta u Würzburgu razvio je eksperimentalni rover čiji kotači ne rade kao obični kotači. Umjesto da se oslanjaju samo na klasično kotrljanje, dizajnirani su tako da u pijesku stvaraju sile slične onima koje saharskoj gušterici omogućuju kretanje ispod površine.
Kada pijesak zaustavi rover
Rover na Marsu ne kreće se po uređenoj stazi. Ispod kotača se izmjenjuju pijesak, sitno kamenje, nagibi i neravna površina. Takav teren stalno testira stabilnost vozila i učinkovitost njegova pogona.
Pijesak je posebno nezgodan jer problem ne nastaje naglo. Kotač najprije počne proklizavati, zatim gubi oslonac, a vozilo se može sve dublje ukopavati. Kada se tonjenje i proklizavanje počnu pojačavati jedno drugo, rover sve teže zadržava smjer i sve se teže izvlači.
Amenosis Lopez, istraživač u timu profesora Marca Schmidta, upozorava da su uobičajeni kotači često prilagođeni sporoj vožnji, ali na mekom terenu mogu kliziti, tonuti ili zapeti. Na Marsu to nije samo tehnička smetnja. Ondje nema servisne ekipe, a gubitak mobilnosti može ozbiljno ograničiti cijelu misiju.
Saharska gušterica kao model za kotače
Scincus scincus živi u Sahari i poznat je po neobičnom načinu kretanja. Kada nestane ispod površine, saharska gušterica ne probija se kroz pijesak poput stroja. Kreće se valovitim pokretima tijela, gotovo kao da pliva kroz sipki materijal.
Upravo je taj princip zanimao tim iz Würzburga. Istraživači nisu pokušali kopirati izgled životinje, nego fiziku njezina kretanja kroz pijesak prenijeti na kotače rovera.
Novi kotači zato ne stvaraju samo potisak prema naprijed. U dodiru s podlogom proizvode i bočne sile, što roveru pomaže da se stabilnije kreće po pješčanom terenu. Tijekom testova vozilo je u pijesku ostavljalo valovite tragove, što je istraživačima pokazalo da se željeni mehanizam doista pojavio u praksi.
Projekt vodi Marco Schmidt, profesor za ugrađene sustave i senzore za promatranje Zemlje na Sveučilištu u Würzburgu. U radu sudjeluju i istraživači iz Bremena, a projekt je dio inicijative VaMEx Njemačkog centra za zrakoplovstvo i svemirske letove.
Prvi testovi pokazali su gdje dizajn zapinje
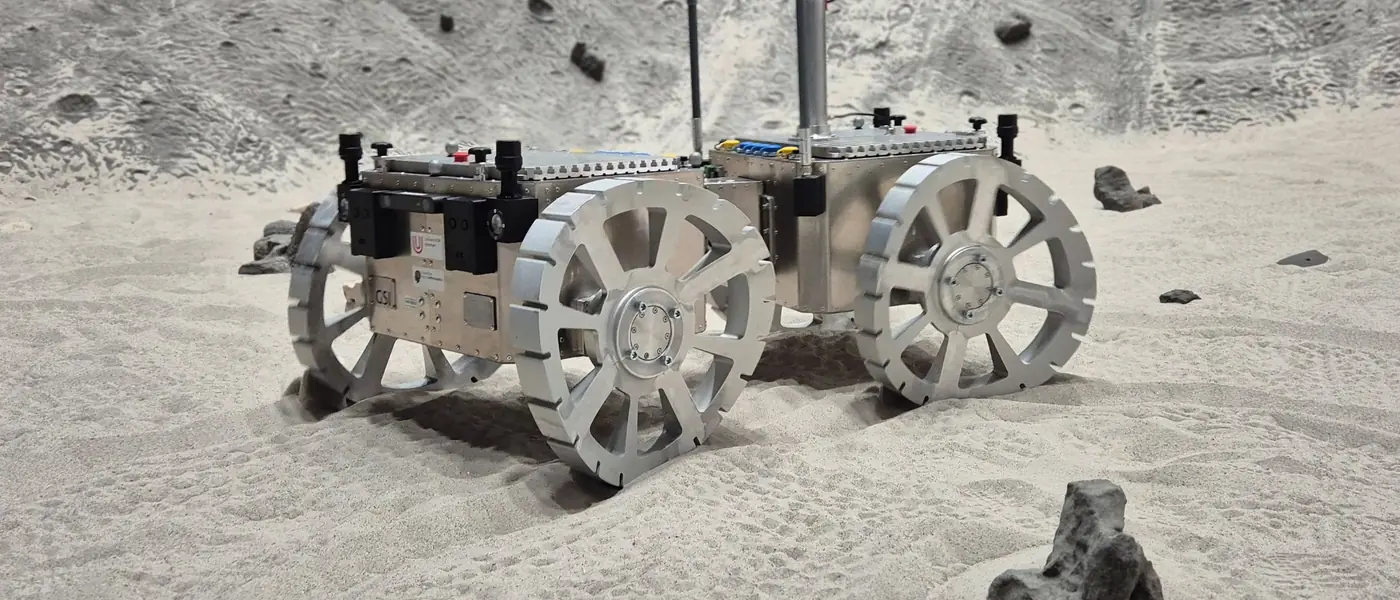
Rover je testiran na pijesku i na otvorenom terenu, u suradnji s Njemačkim istraživačkim centrom za umjetnu inteligenciju u Bremenu i Sveučilištem u Bremenu. Vozilo se na pješčanoj podlozi kretalo stabilno, ali su pokusi brzo pokazali i slabosti prve izvedbe.
Početni kotači, nadahnuti kretanjem saharske gušterice, bili su uži i teži od usporedivih pneumatskih kotača. Zbog toga su jače pritiskali podlogu, pa je rover počeo tonuti. Kako je gubio oslonac, kotači su sve više proklizavali, a upravljanje je postajalo manje precizno.
Istraživači su problem ublažili promjenom konstrukcije. Kotače su proširili i smanjili im masu, čime su smanjili pritisak na podlogu. Rover je nakon toga bio stabilniji, manje je proklizavao i lakše je zadržavao smjer kretanja.
Tim smatra da bi dodatna dorada površine kotača mogla poboljšati kretanje po složenijem terenu, osobito na mjestima gdje rover prelazi iz pijeska na kamenje ili tvrđu podlogu.
Rover koji mora bolje čitati teren
Ovaj projekt ne završava na obliku kotača. Sljedeći cilj je razvoj upravljačkog sustava koji bi roveru omogućio da bolje reagira na podlogu po kojoj se kreće.
Takav sustav morao bi računati s proklizavanjem, tonjenjem i promjenama u dodiru kotača s tlom. Umjesto da samo izvršava zadanu naredbu kretanja, rover bi mogao prilagođavati brzinu, zakretanje i raspodjelu sile stvarnim uvjetima ispod kotača.
Na Marsu takva prilagodba može značiti razliku između sigurnog napredovanja i dugog pokušaja izvlačenja iz pijeska. Teren se neće prilagoditi roveru. Rover će morati bolje reagirati na teren.